|
|---|
|
主题:特斯拉车祸预示自动驾驶技术远未成熟
楼主:NY
粉丝数(49)
|
![[Avatar]](/images/avatar/c20ad4d76fe97759aa27a0c99bff6710.jpg)
| #1 |
|
特斯拉车祸预示自动驾驶技术远未成熟
特斯拉汽车最近爆出的致命车祸,对于呼之欲出的自动驾驶技术是一次严重的打击。
由谷歌和特斯拉领衔发展的自动汽车驾驶技术,最近几年可谓风头十足。两个科技公司对传统汽车业的强力挑战,逼迫传统厂家纷纷出台类似的自动车研制计划。
自动驾驶汽车似乎已经是一项站在家门口的划时代的技术革新,马上就会重塑这个世界和每个人的生活方式。

然而,特斯拉的这次致命车祸,却给这项技术的快速商业化打上一个大大的问号。
当然,很多人不以为然,理由是:
1. 特斯拉目前的技术并非真正的“全自动驾驶”,而是一种高级的辅助驾驶系统,对使用条件有限制和要求(比如要求在全封闭的道路上,并且要求司机处于随时接管自动驾驶的状态)。而这次事故中,据说司机完全依赖了自动驾驶,自己在看DVD。因此,此次事故并非全部是特斯拉的错。
2. 自动驾驶技术正处在突飞猛进的状态,此次事故必定为进一步增加自动驾驶的安全性和适应性提供宝贵的经验。按照其技术发展的速度,这类问题应该不会重演。我们不应该因为某一次意外事故而阻碍一个革命性技术的进步。
在得到我们的结论之前,我们先根据已有的信息判断一下这次事故的大致原因。
出事时,一辆大型货车拖车正在横跨公路,其车体表面为白色平板,车体本身很高,而且那时阳光很强。特斯拉轿车正高速行驶,完全没有探测到该货车。特斯拉垂直和货车撞击,从货车底部冲过去,又行驶了200米才停住,而其车顶被货车削掉,司机死亡。
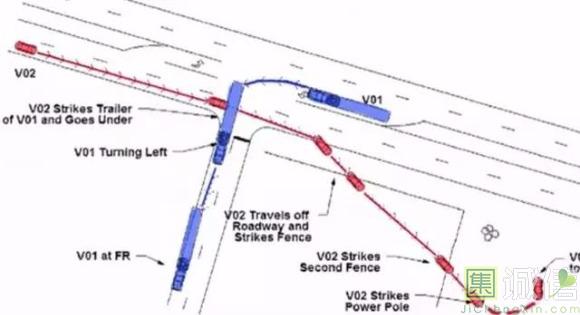 (事故示意图,来源于网络)
 (类似于事故中的超长拖车,图片来源于网络)
特斯拉的解释是:
1. 安装在车上的视觉系统(MobileyeEyeQ3)在强烈阳光下没能识别货车的白色平板表面和天空的区别,从而没有预警和防止撞车。
2. 安装在前保险杠下的毫米波雷达没能够探测到货车,因为货车跨域公路,底盘很高,毫米波雷达位置很低,穿过了货车底部,因此没能探测到货车。
3. 司机没有处于警觉状态,没有对事件作出反应。
根据网上公布的信息,我们知道该型特斯拉轿车安装了前视视觉识别系统,往前探测的毫米波雷达,和侧面后面的超声波传感器。
超声波传感器因为只能探测两米左右的距离,因此仅作为停车等慢速操作时的辅助作用。
所以,特斯拉的自动驾驶系统全部依靠的是视觉系统和毫米波雷达,来保证其自动驾驶和行车安全。
 (车载视觉系统)
视觉系统实际上就是视频图像采集、处理、判断、指挥的一个系统。其核心部分应该是图像处理算法为基础的软件和硬件系统。高速行驶中,通过物体边缘提取、运动轨迹变化等计算获得周围物体相对于本车的运动轨迹和相对位置,从而实现指挥自动驾驶和安全行车的功能。
车祸时,白色的大块表面和强光天空也许让该系统无法提取出边缘形状,从而无法计算出相对速度和位置。
这次事故,说明该系统在这种状况下完全失效。
即使视觉系统失效,毫米波雷达应该是确保安全、防止任何情况下撞车的最后手段。
 (毫米波雷达)
然而,毫米波雷达居然没有看到货车,因为货车车架太高。
据称该毫米波雷达的垂直探测角度为+/-5度,即使货车车体高度为1.5米,该雷达对该货车的探测盲区(垂直方向)仅为17米。当远于该距离时,货车车身应该在+5度探测范围内。因为一般毫米波雷达的有效探测距离可以达到200米,特斯拉车应该在200米以外就能够收到货车的雷达反射信号。
因此,我们只能猜测,特斯拉或者是使用了探测距离仅几十米(甚至仅为20米)的毫米波雷达,或者是在信号的优先级上,在几十米以外都以视觉系统的判断优先,几十米以内以毫米波雷达优先。
无论是哪种可能性,在本次车祸中,结果都是一样的。
视觉系统一直没有发现横跨公路的货车,等到了距离仅为几十米时,毫米波雷达已经无法探测到货车。
因此,本次车祸,出问题的不仅仅是视觉系统,毫米波雷达也一样有严重的隐患。也许特斯拉的系统还无法处理200米范围内反射回来的无数高速变化的毫米波反射信号,因为在公路上,此范围内可以反射雷达波的移动物体太多了。也许是这个原因,特斯拉大幅度缩短了有效毫米波信号的距离,比如仅限于前方的二三十米距离内的反射信号。
而我们再来看视觉系统,在高速运动中,视觉系统必须提取出运动物体的相对速度和位置的关系,从而据此给出行车判断和指令。当我们人类自己开车时,眼睛和大脑就是这样一个视觉系统,指挥着我们的手和脚。
世界上还没有一台电脑能达到一个普通人对周围移动物体的视觉识别和处理的准确度,更不要说特斯拉车载的一个系统的计算能力。这类行车视觉系统因为计算能力的短板,只能大幅度地简化其识别方式,应用轮廓识别边缘提取等简单化的识别和处理算法。
所以,遇到数据库里没有的轮廓和边缘,这类系统只能是漏检或者误测。
同时,我们根据特斯拉给使用自动驾驶的场景做的诸多限制条款,也可以了解到其自动驾驶系统的局限性。一个全封闭的道路,仅存在同向行驶的汽车,而且移动的物体仅限于周围的汽车。这些说明,特斯拉系统能够识别和处理的移动物体,其形状大小、相对速度、运动方向,都是非常局限的。
 (Nvidia的自动驾驶图像处理系统)
最后一点,特斯拉强调,即使使用了其自驾系统,司机仍然需要保持警觉状态,随时准备接管驾驶或者作出反应。他们辩解这次事故,因为司机也没有看到货车,所以最后一道“防线”(也就是司机本人),也没起作用。
到此,我们分析完这次事故。基于有限的公开信息和笔者的个人判断,笔者的结论是,本次事故特斯拉应该担负绝大多数责任。事故根本原因在于其视觉系统和毫米波雷达存在严重的局限性。出事公路上,仅仅是一辆拖挂卡车横过来了,特斯拉就无法做出正确识别和判断。
如果特斯拉要强调司机的责任,那么特斯拉对司机在自动驾驶时做到随时警觉的要求,和其自动驾驶功能的性质是完全自相矛盾的。
首先,本次事故其自驾系统是否给予司机提前预警?
其次,一个自驾系统在代替司机做加速、减速、换道、刹车,甚至拐弯之后,司机的警觉性是会大幅下降的。剥夺了司机操控权,还要求司机一样警觉,这是自相矛盾的。没有控制权的司机根本就不可以在同样的时间内做出自己开车时的判断和选择。因此,也许以后会有立法要求,要么司机处于全部控制状态,要么司机给自驾系统全部控制。谁控制,谁担负最终的责任。没有控制权的驾驶者,不能被称为驾驶者和司机。在紧急状态下,自驾系统一定要给出有足够反应时间的提前预警。
显然,特斯拉自驾系统需要进一步完善。各路舆论也提到了,他们应该再加一部激光测距雷达,或者使用更加昂贵的扫描式毫米波雷达。
其实技术手段是有的。军事上、飞机上的很多设备和技术就可以移植到汽车上。然而,成本是一个必须考虑的因素。成本包括开发成本和产品成本。军事设备的开发成本极高,航空设备则为广大用户平摊承担。而一辆车的消费者,能否负担这类技术?
如果成本过高,就预示着这项技术离真正的普及还有一段不小的时间上的距离。
同时,无论技术如何进步,这类系统都有个故障发生几率。该几率是可以量化的。
比如说,这次致命车祸是Model S系列汽车自动驾驶功能激活使用行驶1.3亿多英里过程中遇到的第一起致命事故。
支持自驾系统的人会说:“全世界平均每6000万英里行程就会发生一起致命车祸”。
就这两个数字来说,我们会认为自动驾驶优于我们人类自己开车。但是,人类车祸发生的很多很多原因是可以避免的。大量的车祸发生于:酒驾、交通状况混乱的地区、疲劳驾驶、开车新手、汽车自身故障、自然条件危险的路段,等等。如果你是一个有经验的有自制力的司机,你会避免掉大部分这些状况。所以刚才那个6000万英里一次致命车祸的统计数字,对于你个人来说,你可以实现比这个数字小得多的车祸几率。也许对于你,你的车祸几率仅为目前特斯拉车祸几率的1/10或者更低。
最为重要的是,这是你可以控制和提高的。
然而,当你坐上一辆自动驾驶汽车后,对于出车祸的几率你无能为力,因为那是由技术决定的。因此,对于好司机而言,使用目前的自动驾驶汽车,其车祸风险会大幅增加。
因此,我们可以得出下面的判断:
本次特斯拉车祸,反映的是特斯拉自驾技术的极大的局限性。把这种不成熟的技术过早地实际应用,结果将会是事故的发生。对于驾车习惯良好的司机而言,自驾系统导致的风险会大幅增加。这次车祸,预示自驾技术绝非人们想象的、或者说那几个研发公司宣传的那样,已经站在家门口。也许这项技术还需要更多年月的实验室磨练才行。
等自动驾驶系统的安全性至少再提高几十倍时,也许大规模的应用才会真正开始。
(集诚信特约文章。转载需标明作者名和集诚信 jichengxin.com)
这篇文章被编辑了 2 次. 最近一次更新是在 2016/07/04 00:31:59 打赏 | |
![[Avatar]](/images/avatar/55a7cf9c71f1c9c495413f934dd1a158.png)
| #2 |
|
好长啊
| |
![[Avatar]](/images/avatar/98f13708210194c475687be6106a3b84.jpg)
| #3 |
|
本次事故特斯拉应该负全部责任。路上行驶什么车都有可能遇到。有些车型无法识别出来,如果驾驶员早知道是这样的自动驾驶,相信司机不会选这款车了!
| |
![[Avatar]](/images/default_person.png)
| #4 |
|
非常专业的分析!
| |
|
| #5 |
|
特斯拉车又出车祸
据国外媒体报道,一辆2016年出厂的特斯拉Model X电动汽车在宾夕法尼亚州收费公路上发生侧翻,当时该车处于Autopilot自动驾驶模式。事故中并未造成人员伤亡
(转)
| |
|
| #6 |
|
第三起特斯拉自动驾驶的车祸,看来特斯拉和自动驾驶都会偃旗息鼓一段时间。 在媒体报道了被SEC调查的情况后,特斯拉股价在周一盘后交易中下跌1.1%,至222.2美元。
(澎湃新闻)
| |
![[Avatar]](/images/avatar/3ef815416f775098fe977004015c6193_1490789815655.jpeg)
| #7 |
|
贵阳土豪弄了很多辆特斯拉新车来跑专车,好像是80元起步,豪啊~
| |